站")

GPS系統(tǒng)恒溫晶振時間間隔測量模塊分析
來源:http://m.ike-digital.com 作者:康華爾電子 2018年04月09
GPS導(dǎo)航定位系統(tǒng)開始發(fā)展的時間較早,起源于美國軍方的一個項目,在中國北斗系統(tǒng)沒研發(fā)出來之前,GPS系統(tǒng)一直是全球軍工,商業(yè)和民用領(lǐng)域使用的定位和導(dǎo)航高科技產(chǎn)品。這個概念最早是在1958年出現(xiàn),經(jīng)過60年的發(fā)展,在現(xiàn)今的互聯(lián)網(wǎng)時代,GPS仍然是非常有發(fā)展前景,而且技術(shù)也越來越成熟。大到飛機(jī)輪船,航天小到智能手機(jī),汽車導(dǎo)航等,GPS和我們的生活息息相關(guān),是科學(xué)家們長期研究的方向。
高精度的時間測量是實現(xiàn)馴服保持的基礎(chǔ),一般都使用比時法測頻差的方法實現(xiàn)對恒溫晶振的鎖定,其中最常用的方法就是直接計數(shù)法,即在有待測時間間隔構(gòu)成的閘門信號中填入脈沖,通過必要的計數(shù)電路,得到填充脈沖的個數(shù)后再乘以填充周期便可計算出待測的時間間隔。但是這種方法的測量精度很低,主要取決于填充脈沖的頻率,有源晶振頻率越高測量精度越高,但在實際應(yīng)用中,這會大大提高對相應(yīng)器件和線路的要求,同時還存在±1個字的量化誤差,直接計數(shù)法如圖4.3
所示:

其它常用的時間間隔測量方法還有模擬內(nèi)插法、游標(biāo)法、量化延遲法、時間幅度轉(zhuǎn)化法,雖然這些方法都具有很高的測量分辨率,但是它們的測量范圍都很小,于是考慮將直接計數(shù)法和上述某一種高分辨率測量方法相結(jié)合的測量方法, 從而可以同時兼顧到測量分辨率和測量范圍。
本文采用將直接計數(shù)法和時間一幅度轉(zhuǎn)化法相結(jié)合的時間間隔測量方法,對時間間隔閘門首先用直接計數(shù)法計數(shù),由圖43所示,T為被測時間間隔值,T為由直接計數(shù)法計算得到的時間間隔測量結(jié)果,T和T2分別代表代表時間間隔的開始信號和結(jié)束信號與計數(shù)時鐘信號之間的不同步部分,即直接計數(shù)法中存在的量化誤差部分,而這兩部分短時間間隔值由采用時間一幅度轉(zhuǎn)換法來測量。因此被測時間間隔值可由下式計算得到:
TX=TN+T1-T2 式(4-1)
由于輸入到時間間隔測量模塊的兩信號為來自GPS接收機(jī)的IPPS信號和OCXO晶振分頻得到的1Hz信號,分別以待測閘門的上升沿和下降沿作為短時間間隔T和T的開門信號,以緊隨它們的第一個填充信號的上升沿和下降沿作為關(guān)門信號。
因為填充脈沖為OCXO石英晶體振蕩器輸出的10MHz信號,理論上1Hz信號和填充脈沖的上升沿是嚴(yán)格對齊的或者有一個固定的相位差,所以可以認(rèn)為結(jié)束信號與填充脈沖之間的相位關(guān)系不再是隨機(jī)的,而是相關(guān)的。也就是在該系統(tǒng)中只需考慮待測時間向間隔開門后的短時間間隔T,而不必考慮關(guān)門后的短時間間隔T2,所以待測時間間隔變?yōu)門=T+T1,時間一幅度轉(zhuǎn)換法的原理圖如圖4.4所示同。
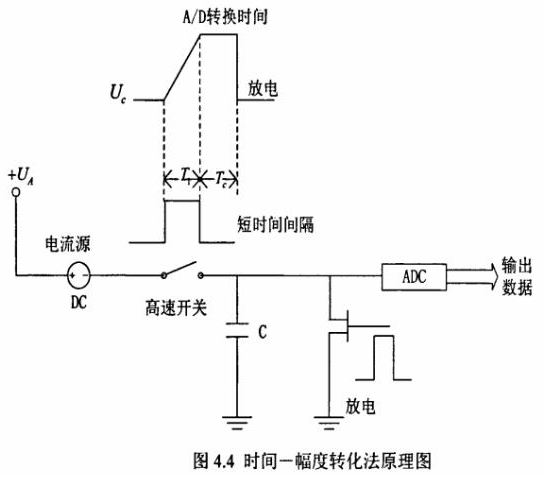
具體電路實現(xiàn)時采用CPLD和帶有AD轉(zhuǎn)換器的單片機(jī)MSP430F247)以及外圍的電流源電路、高度開關(guān)、放電MOS管等構(gòu)成,充放電電路如圖4.5所示。
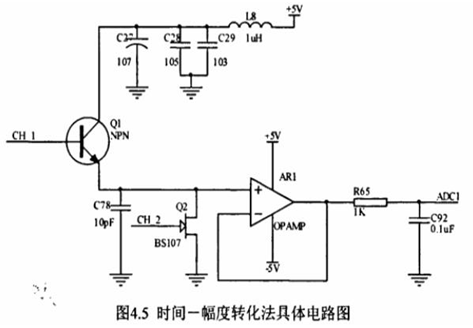
CPLD用于取出直接計數(shù)法中計數(shù)OCXO石英晶振時鐘信號和代表被測時間間隔閘門的開始信號和結(jié)束信號之間的不同步部分,并將它們轉(zhuǎn)化為窄脈沖輸出。當(dāng)短時間間隔脈沖CH1的開門信號輸入到三極管Q1的基極時,用+5V的直流電源對電容進(jìn)行充電,以實現(xiàn)時間一幅度初步轉(zhuǎn)換;當(dāng)短時間間隔閘門的關(guān)門信號到來時,三極管截止,停止充電并保持充電電壓。信號調(diào)理電路將其幅度調(diào)理到單片機(jī)AD轉(zhuǎn)換器的輸入范圍內(nèi)后送入單片機(jī)的AD轉(zhuǎn)換器進(jìn)行轉(zhuǎn)化,完成轉(zhuǎn)化后向效應(yīng)管BS170發(fā)出個復(fù)位信號CH_2,使場效應(yīng)管導(dǎo)通,電容迅速放電,為下一次測量做好準(zhǔn)備最后單片機(jī)根據(jù)AD轉(zhuǎn)換結(jié)果,計算出對應(yīng)的時間間隔值,從而完成了一次完整的測量過程。
這種方法的優(yōu)點是測量分辨率高,轉(zhuǎn)換時間短。但不足之處就是轉(zhuǎn)換存在非線性誤差,因此使用前需要對其校準(zhǔn),將時間間隔隨時間變化的兩路不同源信號同時輸入測量模塊和HP5370B,進(jìn)行測量范圍內(nèi)的約40點逐點校準(zhǔn),而后將校準(zhǔn)數(shù)據(jù)存入單片機(jī)自帶的Fash存儲器,測量時査表并線性擬合得到結(jié)果,該區(qū)間內(nèi)根據(jù)式(4-2)按線性關(guān)系計算該電壓值所對應(yīng)的短時間間隔值T1.

其中U為AD轉(zhuǎn)換得到的電壓值,Um和U-分別為所對應(yīng)電壓區(qū)間的上限電壓值,Tm和T分別為Um和Um所對應(yīng)的標(biāo)準(zhǔn)時間間隔值,這樣就在一程度上減小了非線性誤差。
高精度的時間測量是實現(xiàn)馴服保持的基礎(chǔ),一般都使用比時法測頻差的方法實現(xiàn)對恒溫晶振的鎖定,其中最常用的方法就是直接計數(shù)法,即在有待測時間間隔構(gòu)成的閘門信號中填入脈沖,通過必要的計數(shù)電路,得到填充脈沖的個數(shù)后再乘以填充周期便可計算出待測的時間間隔。但是這種方法的測量精度很低,主要取決于填充脈沖的頻率,有源晶振頻率越高測量精度越高,但在實際應(yīng)用中,這會大大提高對相應(yīng)器件和線路的要求,同時還存在±1個字的量化誤差,直接計數(shù)法如圖4.3
所示:
其它常用的時間間隔測量方法還有模擬內(nèi)插法、游標(biāo)法、量化延遲法、時間幅度轉(zhuǎn)化法,雖然這些方法都具有很高的測量分辨率,但是它們的測量范圍都很小,于是考慮將直接計數(shù)法和上述某一種高分辨率測量方法相結(jié)合的測量方法, 從而可以同時兼顧到測量分辨率和測量范圍。
本文采用將直接計數(shù)法和時間一幅度轉(zhuǎn)化法相結(jié)合的時間間隔測量方法,對時間間隔閘門首先用直接計數(shù)法計數(shù),由圖43所示,T為被測時間間隔值,T為由直接計數(shù)法計算得到的時間間隔測量結(jié)果,T和T2分別代表代表時間間隔的開始信號和結(jié)束信號與計數(shù)時鐘信號之間的不同步部分,即直接計數(shù)法中存在的量化誤差部分,而這兩部分短時間間隔值由采用時間一幅度轉(zhuǎn)換法來測量。因此被測時間間隔值可由下式計算得到:
TX=TN+T1-T2 式(4-1)
由于輸入到時間間隔測量模塊的兩信號為來自GPS接收機(jī)的IPPS信號和OCXO晶振分頻得到的1Hz信號,分別以待測閘門的上升沿和下降沿作為短時間間隔T和T的開門信號,以緊隨它們的第一個填充信號的上升沿和下降沿作為關(guān)門信號。
因為填充脈沖為OCXO石英晶體振蕩器輸出的10MHz信號,理論上1Hz信號和填充脈沖的上升沿是嚴(yán)格對齊的或者有一個固定的相位差,所以可以認(rèn)為結(jié)束信號與填充脈沖之間的相位關(guān)系不再是隨機(jī)的,而是相關(guān)的。也就是在該系統(tǒng)中只需考慮待測時間向間隔開門后的短時間間隔T,而不必考慮關(guān)門后的短時間間隔T2,所以待測時間間隔變?yōu)門=T+T1,時間一幅度轉(zhuǎn)換法的原理圖如圖4.4所示同。
具體電路實現(xiàn)時采用CPLD和帶有AD轉(zhuǎn)換器的單片機(jī)MSP430F247)以及外圍的電流源電路、高度開關(guān)、放電MOS管等構(gòu)成,充放電電路如圖4.5所示。
CPLD用于取出直接計數(shù)法中計數(shù)OCXO石英晶振時鐘信號和代表被測時間間隔閘門的開始信號和結(jié)束信號之間的不同步部分,并將它們轉(zhuǎn)化為窄脈沖輸出。當(dāng)短時間間隔脈沖CH1的開門信號輸入到三極管Q1的基極時,用+5V的直流電源對電容進(jìn)行充電,以實現(xiàn)時間一幅度初步轉(zhuǎn)換;當(dāng)短時間間隔閘門的關(guān)門信號到來時,三極管截止,停止充電并保持充電電壓。信號調(diào)理電路將其幅度調(diào)理到單片機(jī)AD轉(zhuǎn)換器的輸入范圍內(nèi)后送入單片機(jī)的AD轉(zhuǎn)換器進(jìn)行轉(zhuǎn)化,完成轉(zhuǎn)化后向效應(yīng)管BS170發(fā)出個復(fù)位信號CH_2,使場效應(yīng)管導(dǎo)通,電容迅速放電,為下一次測量做好準(zhǔn)備最后單片機(jī)根據(jù)AD轉(zhuǎn)換結(jié)果,計算出對應(yīng)的時間間隔值,從而完成了一次完整的測量過程。
這種方法的優(yōu)點是測量分辨率高,轉(zhuǎn)換時間短。但不足之處就是轉(zhuǎn)換存在非線性誤差,因此使用前需要對其校準(zhǔn),將時間間隔隨時間變化的兩路不同源信號同時輸入測量模塊和HP5370B,進(jìn)行測量范圍內(nèi)的約40點逐點校準(zhǔn),而后將校準(zhǔn)數(shù)據(jù)存入單片機(jī)自帶的Fash存儲器,測量時査表并線性擬合得到結(jié)果,該區(qū)間內(nèi)根據(jù)式(4-2)按線性關(guān)系計算該電壓值所對應(yīng)的短時間間隔值T1.
其中U為AD轉(zhuǎn)換得到的電壓值,Um和U-分別為所對應(yīng)電壓區(qū)間的上限電壓值,Tm和T分別為Um和Um所對應(yīng)的標(biāo)準(zhǔn)時間間隔值,這樣就在一程度上減小了非線性誤差。
正在載入評論數(shù)據(jù)...
相關(guān)資訊
- [2024-02-18]CTS汽車級CA系列時鐘振蕩器
- [2024-01-20]TXC晶技5G通信專用小型7050mm恒...
- [2024-01-20]TXC恒溫晶體振蕩器新產(chǎn)品方案發(fā)...
- [2023-12-28]關(guān)于GEYER格耶品牌產(chǎn)品設(shè)計與支...
- [2023-12-28]GEYER格耶電子晶振公司的制品詳...
- [2023-11-06]Wi2Wi品牌發(fā)布其新的SN系列晶體...
- [2023-10-13]美國GED高質(zhì)量時鐘晶體振蕩器
- [2023-09-25]H.ELE從原始石英晶體到精密晶體...


 業(yè)務(wù)經(jīng)理
業(yè)務(wù)經(jīng)理
